




Contact : Romain SABORET, Clément PENE
Organisation : SII
Projet : Improve UWB performances with navigation system in a robotic application
Description du projet :
SII Research is developing an embedded prototype using Ultra-Wide-Band technology.
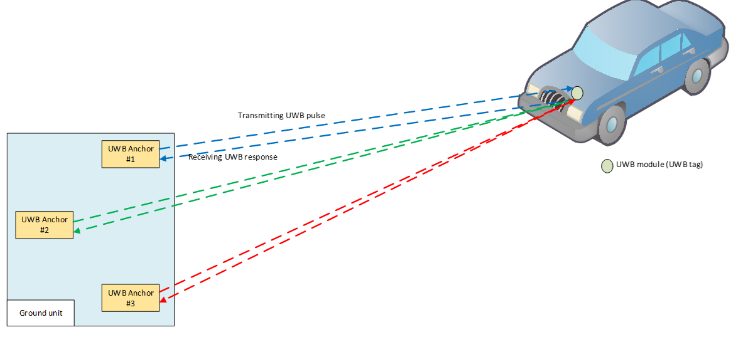
Current robot technology does not allow us to interconnect them due to precision errors. Sub-centimeter localization technology is required to make a robot plug a device, or operate machinery. In our team at SII research, we are working both on the short-range and long-range localization systems.
Our current prototype is a small robot embedding 3 UWB anchors that must locate a UWB tag and move close to it. Position algorithms using UWB are already developed and the next objective is to use navigation to improve the localization while moving. The robot will evolve in a context where mapping is impossible.
The team should propose a solution to make this navigation possible.
Tasks will include: * Research the robotic navigation state of the art * Chose a suitable navigation system * Improve localization algorithms data with chosen navigation system * Develop ROS2 packages to be added to final prototype * Implement the solution on the final robot * Report and oral presentation
Organization : * At least one meeting per week will be organized with SII research team